Savaeigis robotas įvirintų į sienelę vamzdžių suvirinimo siūlėms automatiškai tikrinti / NOZZLEINSPECT
Projekto kodas: SME-2008-1-232523
ES programa: Framework Programe 7 (FP7)
Projekto tikslas
Sukurti savaeigį robotą įvirintų į sienelę vamzdžių suvirinimo siūlių greitam automatiniam tikrinimui atlikti.
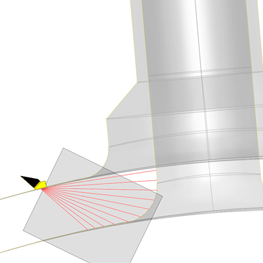
Ultragarso institutas
Taikant skaitmeninio modeliavimo metodus sukūrė įvirintų į sienelę vamzdžių tyrimo technologiją, kurioje įdiegtas impulso atspindžio metodo akustinio spindulio šoninis derinimas zondavimo ašies atžvilgiu, siekiant aptikti defektus kurių plokštuma nėra statmena zondavimo ašiai.
Projekto partneriai
TWI (Jungtinė Karalystė), Nexus (Bulgarija), Vermon (Prancūzija), Peak NDT (Jungtinė Karalystė), Iberdola (Ispanija), HES (Bulgarija), Kauno Technologijos Universitetas (Lietuva), Zenon (Graikija).