Sutartis tarp HAAG Elektronische Messgeräte GmbH ir KTU Ultragarso mokslo instituto
Kontrakto nr.: 7603
Sukurti ultragarsinę judančio objekto koordinačių matavimo sistemą, kuri leistų labai tiksliai nustatyti autonomiškai judančio objekto koordinates.

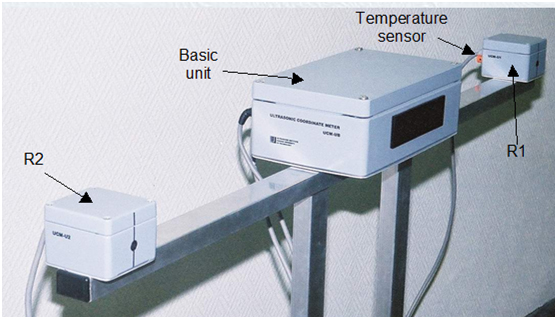
Sistema sudaryta iš mažų matmenų ultragarsinių bangų siųstuvo, pritvirtinto prie judančio objekto, dviejų ultragarsinių bangų imtuvų 1 m atstume vienas nuo kito ir programinės įrangos, skirtos objekto dviejų koordinačių suskaičiavimui ir pavaizdavimui kompiuterio ekrane. Sinchronizuojamas infraraudonų spindulių signalu ultragarsinių bangų siųstuvas siunčia 40 kHz dažnio impulsus. Šie signalai priimami dviem imtuvais ir apdorojami signalų procesoriumi. Sistemos atsparumo trikdžiams padidinimui siųstuvas siunčia koduotas sekas. Objekto padėtis nustatoma binauraliniu principu.